El Centro de Investigación en Tecnologías para la Sociedad (C+) perteneciente a la Dirección de Innovación de la Facultad de Ingeniería UDD realizó una nueva jornada de las Reuniones de Investigación 2021, evento que tiene por objetivo de divulgar proyectos e iniciativas que impulsan investigadores del país. En la oportunidad, se dio la bienvenida oficial a Juan Pablo Álvarez y Natalie Lebrun-Pinochet quienes se integran al equipo de la Dirección de Innovación.
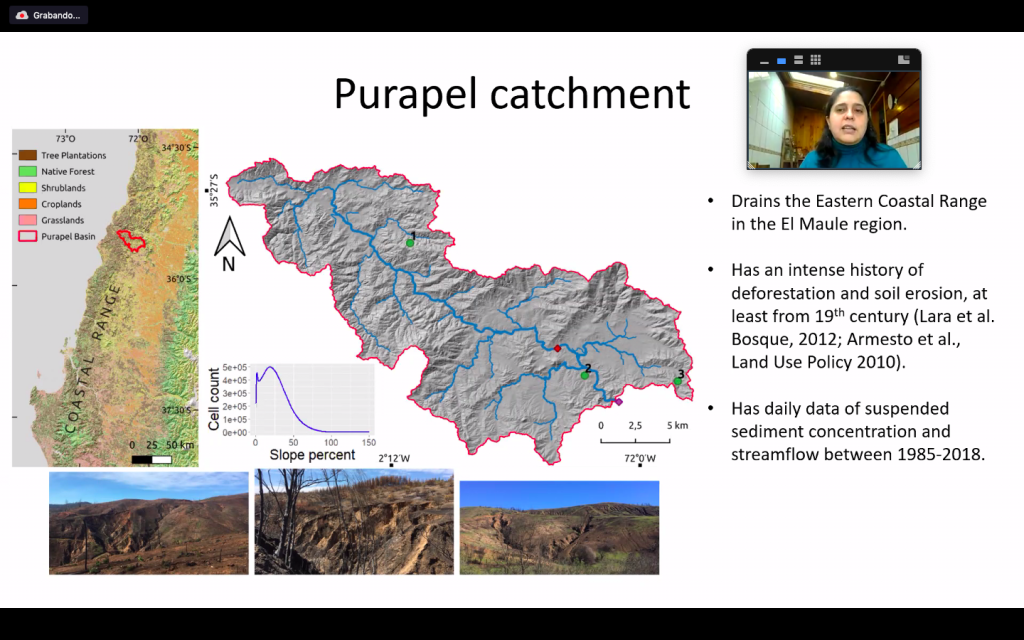
Violeta Tolorza, PhD. investigadora de la Universidad de la Frontera, invitada por el Grupo de investigación EnviroHealth Dynamic Systems de C+, Facultad de Ingeniería UDD, presentó el proyecto “Sedimentos suspendidos y erosión en un paisaje altamente perturbado. Cuenca del río Purapel”. Violeta Tolorza explicó que los principales cambios en las estructura de suelos aledañas al río Purapel se han producido hasta el año 2017 por incendios forestales, así como también, debido a las cosechas que se realizan durante todo el año. A partir de esta información se crearon dos modelos que permiten automatizar el proceso de recolección de información sobre el flujo de sedimento suspendido. Violeta Tolorza destacó además los procesos que pueden frenar el flujo de sedimentos en el sistema perturbado está “la disponibilidad de sedimentos de suelos en las laderas puede disminuir el tiempo si la erosión es mayor que la producción de los suelos. Además tanto las precipitaciones como la erosividad RUSLE han estado disminuyendo”, señaló.
Posteriormente, Andrés Cepeda y Felipe Roa, Investigadores Adjuntos, Grupo de investigación Nuevos Materiales y Sistemas de Manufactura de C+ de la Facultad de Ingeniería UDD, abordaron el tema “Soft Robotics: Investigación y aproximaciones”. Andrés Cepeda señaló que la robótica blanda es un campo de investigación en claro crecimiento, centrada en el uso de estructuras blandas que reemplazan parcial o totalmente las partes y piezas de un sistema de movimiento convencional. Esta característica busca otorgar una mejor relación entre la robótica y los objetos, gracias a sus propiedades elásticas, adaptativas y versátiles.
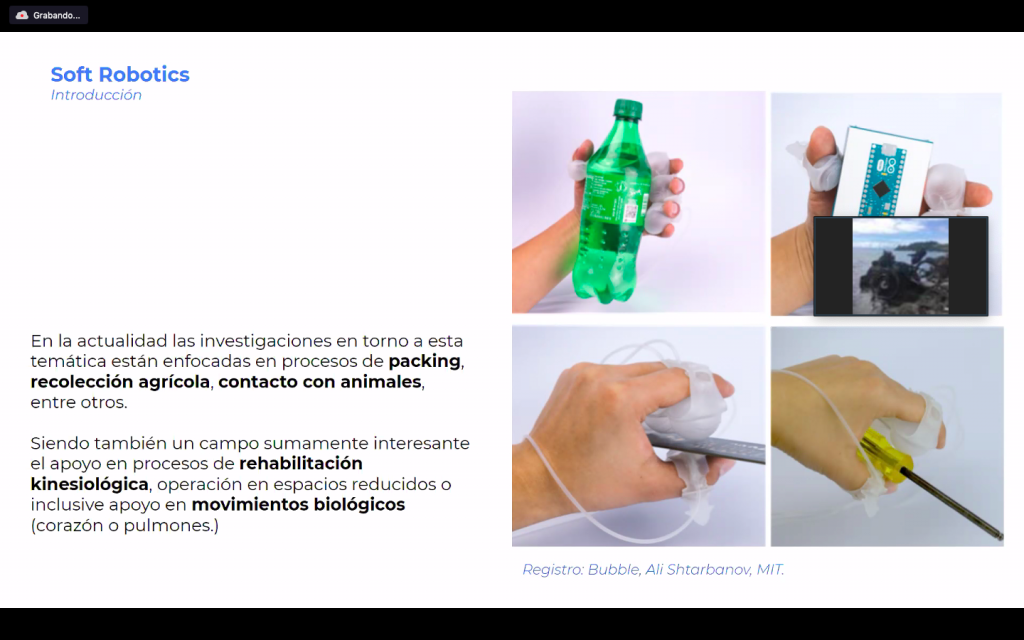
Andrés Cepeda comentó que el desafío de elaborar un soft robot puede abordarse desde 3 sistemas que pueden interactuar: actuadores (modelado), control (sistemas de manejo de aire) y sensores (automatización). “Los acercamientos e investigaciones hasta la fecha van por dos caminos: actuadores de silicona, para desarrollos automatizados y ambientes complejos y actuadores origami lo cual permite la búsqueda de material y bajar costos”, indicó. Agregó que entre los resultados está que uno de los primeros actuadores, descargados desde el repositorio digital “soft robotics toolkit” proveniente de Harvard Biodesign Lab. Posteriormente, Felipe Roa señaló que los objetivos de la aplicación de esta tecnología en Chile pueden ser: la rehabilitación kinesiológica/mímesis de movimientos, picking de alimentos, manipulación de explosivos y rescate y exploración en espacios reducidos.
Las reuniones de investigación 2021 se realizan todos los viernes de 10:30 a 11:30 horas vía Zoom. Para consultas e inscripciones escribe a [email protected]